UC Louvain at Eurobot 2025: Designing Precision with Bot Save the Queen

Our Eurobot Project with Eurocircuits PCBs
Introduction
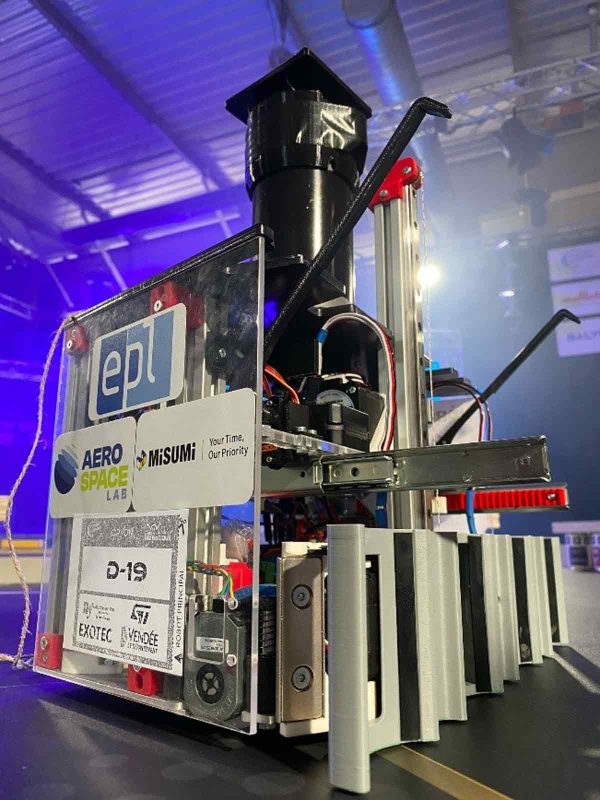
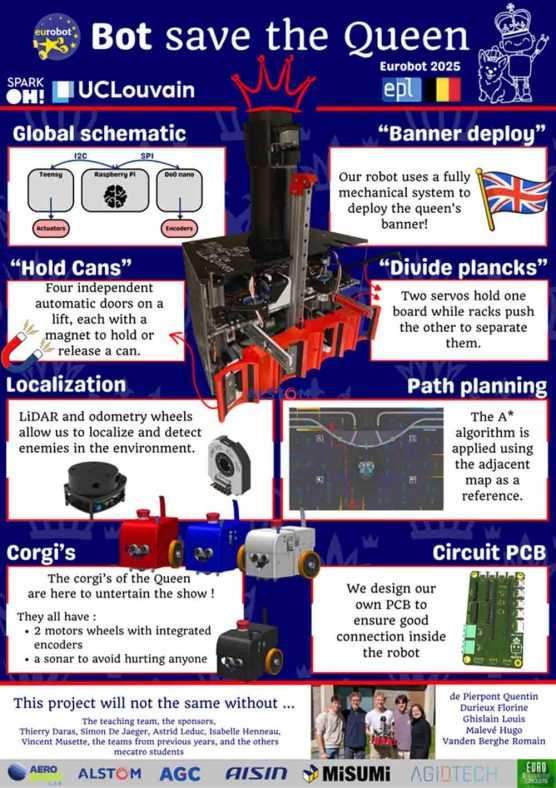
As part of our Master’s degree in Mechatronics Engineering, we participated in the Eurobot competition 2025, a challenge requiring autonomous robots to perform complex tasks. Our team, Bot Save the Queen, developed a robot capable of deploying banners, constructing stands with cans and planks, and navigating efficiently within the game arena. The project spanned several months of intensive design, prototyping, and testing, culminating in two-minute matches against international teams.
Design Objectives
Our primary goal was to design a robust, reliable, and clearly structured electronic system. The focus was on the safe distribution of power and signals, achieved through custom PCBs interconnecting the main computing units. The robot was powered by two 12 V batteries, requiring the use of dedicated power distribution boards to safely supply each subsystem. Particular care was given to voltage compatibility between 5 V sensors and 3.3 V processors, ensured by level shifters
soldered directly onto our custom PCBs. Finally, the overall electronic architecture was designed to be intuitive and well-documented, allowing every team member to understand and modify it when needed.
Electronic Architecture
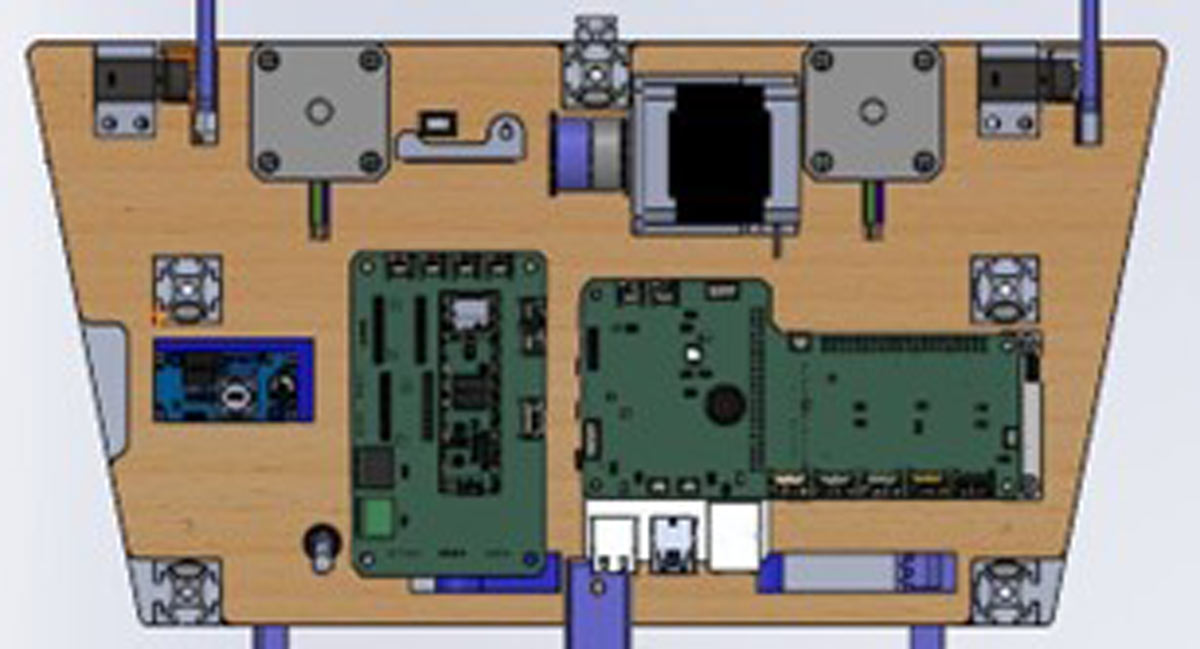
The robot relied on three main computing units. The Raspberry Pi acted as the central controller, the DE0-Nano managed odometry and sensor data, and the Teensy handled the actuators and motors. Two custom PCBs were designed: the first ensured SPI communication between the Raspberry Pi and the DE0-Nano, while the second hosted the Teensy and distributed control signals to the actuators. The system also integrated I2C lines for peripheral communication. Communication reliability was verified using oscilloscope measurements and indicator tests on the Teensy, ensuring proper synchronization between all components.
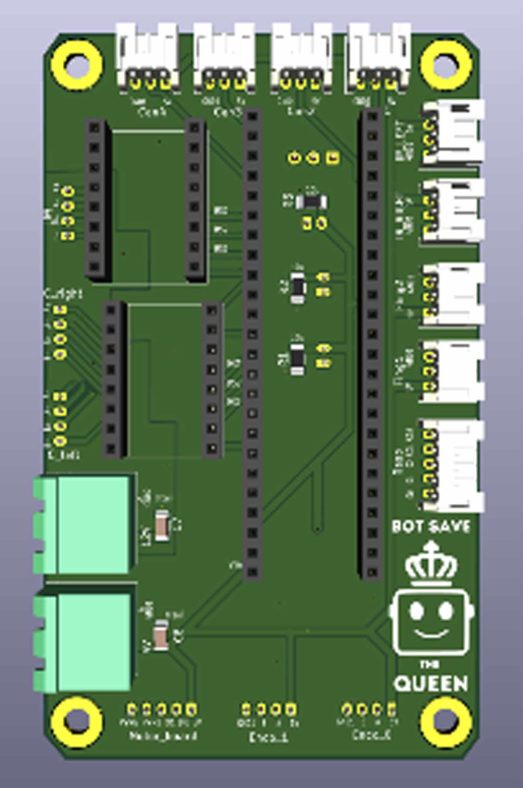
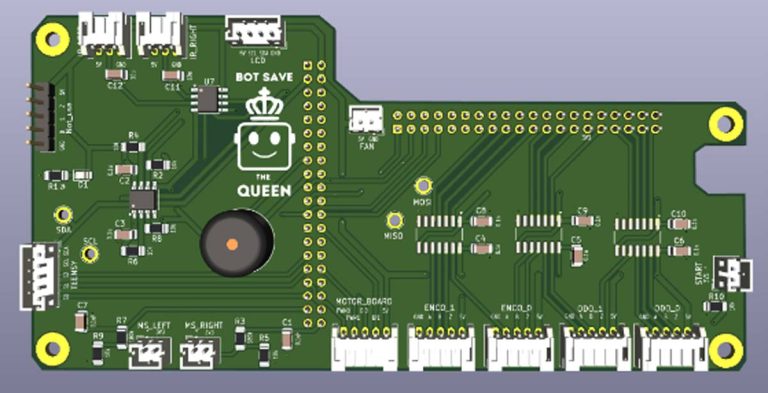
Integration of Eurocircuits PCBs
The custom PCBs were manufactured by Eurocircuits following careful internal reviews. The first board managed SPI communication between the Raspberry Pi and DE0-Nano, while the second hosted the Teensy and distributed signals to actuators and wheel connectors. The boards arrived just three days after validation, with exceptional precision and quality. Their L-shaped form factor allowed seamless integration into the robot, maintaining compactness and accessibility.
Mechanical and Functional Design
Mechanically, the robot was built to be robust and easy to maintain. The banner deployment system was entirely passive, relying on a set of drawers and hooks triggered by motion. For the construction of stands, servo motors and stepper motors ensured precise and synchronized movements — the result of many hours of fine-tuning. Navigation was based on pure odometry, complemented by a lidar used to detect and avoid opponents during matches.
Competition Results
During the Belgian qualifications, our team achieved 3rd place securing a spot in the European finals. In the finals, we ranked 5th overall, outperforming all other Belgian teams and competing against highly experienced international groups. The robot performed reliably, demonstrating the robustness of our electronics and the effectiveness of our design.
Experience with Eurocircuits
Collaborating with Eurocircuits was smooth and highly beneficial. They provided professional technical reviews, rapid and reliable production, and exceptional quality. This allowed seamless integration of the PCBs into our robot, ensuring precision, reliability, and functionality. Their platform made uploading and verifying our designs straightforward.
Conclusion and Video
This project was an excellent opportunity to apply technical knowledge in a real-world challenge while fostering teamwork and creativity. We sincerely thank Eurocircuits for their support.
You can watch our robot in action on YouTube:
https://www.youtube.com/watch?v=xOqMiPBRwyo
For more information please visit the UC Louvain website.
Bring your product to market on time and within budget – join the Eurocircuits Community


![]()

