Project MARCH X: Redefining Exoskeletons

Project MARCH X and Eurocircuits
Project MARCH is a student team of the Technical University Delft. These student teams are also called Dream Teams at the Technical University Delft. Every year since 2015 a group of around 27 enthusiastic and motivated students put their studies on hold for a year to fully commit themselves to designing, developing and building an exoskeleton. An exoskeleton is a robotic motorized suit that enables someone with a complete spinal cord injury, who is wheelchair-bound, to stand up and walk again. We design this year’s exoskeleton together with our 28th and most important team member: our pilot Daan van der Heyden. Daan has a complete spinal cord injury and this year will be his second year at Project MARCH!

The goal of MX
The vision of Project MARCH is that by pushing the boundaries of exoskeleton technology, we can improve the quality of life for people with a spinal cord injury. We want to accomplish this by building an innovative exoskeleton each year. In the last few years Project MARCH has focused on dynamic walking, which means that the exoskeleton is more adaptable to daily life. The exoskeleton is now able to see its surroundings by the use of cameras, and react to them by stepping on the right spots and giving suggestions to the pilot. Last year’s team (MIX) focused on completing the CYBATHLON 2024, one of the biggest bionic competitions in the world. This year we want to focus on expanding the possibilities of using the exoskeleton in social activities. Particularly using it at a standing concert making it self-balanced while resisting external disturbances, and by allowing a more natural walk to decrease physical effort for our pilot.
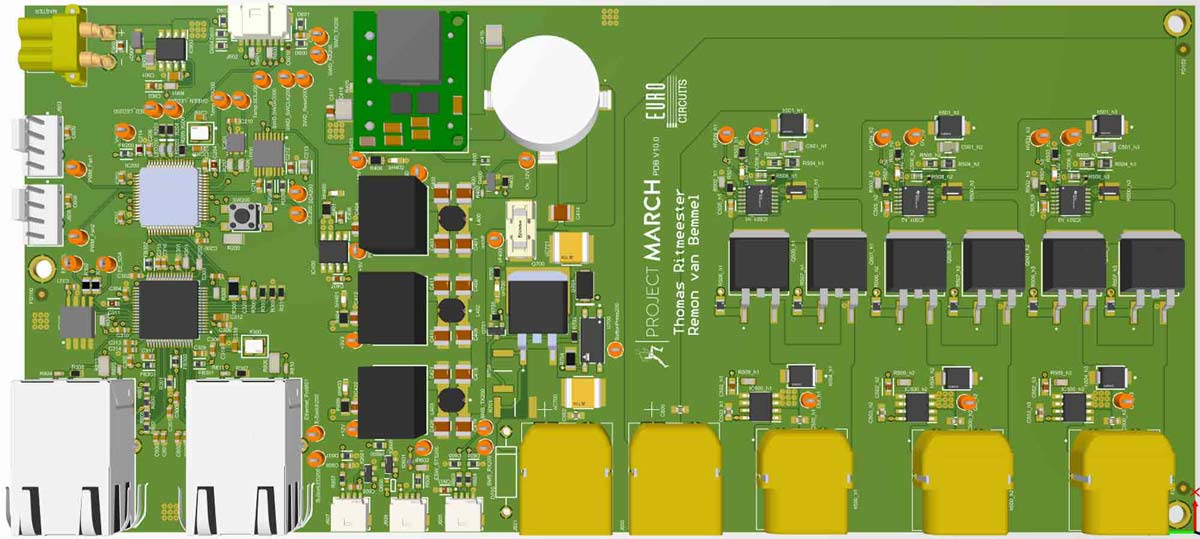
Power Distribution Board
The Power Distribution Board is a recurring project in Project MARCH, responsible for conversion, distribution and monitoring of power throughout the exoskeleton. It receives 48V power from the onboard battery pack, and converts this to lower voltages for the low-power components. In addition, it monitors the current to our MDrive motor controllers, regulating inrush currents and detecting faults. The data collected by our Power Distribution Board is connected to a central computer using Ethercat, which logs the data.
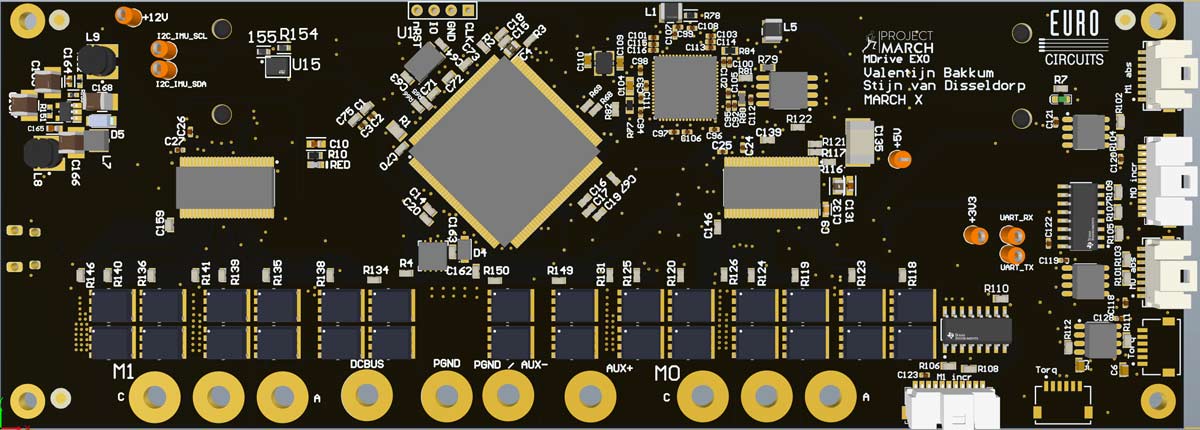
MDrive
This year marks the second year of designing, producing and using our own custom motor controllers. A motor controller is a device that can control the performance of a motor, making sure it works as intended by the software. Before MARCH VI, project MARCH was using the IMotion Cube motor controller. After that, we began using the ODrive motor controllers. These had their advantages over the IMotion Cube, but were still not perfect. One of the disadvantages of the ODrives is that they cannot communicate directly with the EtherCAT train, which was and still is the main communication method in our exoskeleton. To work around this problem, MARCH VII and MARCH VIII have made a customization that allows communication over EtherCAT: the DieBo. Finally, MARCH IX decided to get rid of the DieBo and design their own motor controller, based on a combination of the ODrive and the DieBo: The MDrive. This worked great, and this year we as MARCH X will iterate even further on this concept. Our new version will have a more powerful chip to allow for more and better communication with our sensors.
Design Reveal
Since the beginning of our year, we have put a lot of effort into designing the best possible exoskeleton. And soon, our new design for the MARCH X exoskeleton will be ready to be shown to the public! On the 19th of March, we will show off our design, including the PCBs in which our Electrical Engineers received help from Eurocircuits. Curious to see how it turned out? You can get a ticket at https://eventix.shop/n733uwa7!
For more information please visit the Project March website.
Bring your product to market on time and within budget – join the Eurocircuits Community


![]()

