WARR Space Robotics

Design of a power-efficient, low-profile Electronic Speed Controller

WARR Space Robotics is an interdisciplinary team of robotics enthusiasts from the Technical University of Munich. The space robotics team shares a common goal across its projects: Development of autonomous robotic technologies to de-risk future manned space exploration missions.
Our team hit a significant milestone with the successful creation of an Electronic Speed Controller (ESC) prototype. This is the driving force behind the wheels of our rover, which requires two motor controllers per wheel: One drives the wheel, and the other steers it. After a survey of commercial options, none of the solutions available were found to offer such capability on a compact form factor. This led the space robotics team to the decision of designing an ESC specific to rover applications.
Naturally the development of such a complex piece of hardware started with the design and evaluation of a prototype. The ESC prototype integrates, shown in the image above. a microcontroller from the STM32L4 family to facilitate communication. A board based on the TMC4671 BLDC driver empowers motor control.
To achieve a compact form-factor, the decision was made to use GaN technology for the design of the inverter (power stage). The EPC9146 motor drive board offered the possibility for quick evaluation of our ESC. Furthermore, the prototype features an isolation barrier, completely decoupling the logic and power stages. This allows us to safely use high-voltage DC sources to drive our motors, thus enabling higher power efficiency.
The first validated ESC prototype (shown in the image above) consisted of multiple evaluation PCBs, connected together as building blocks to achieve the desired functionality. This approach enables low-cost iterative design as each block is designed, tested, and evaluated independently, as opposed to multiple iterations of a larger integrated PCB.
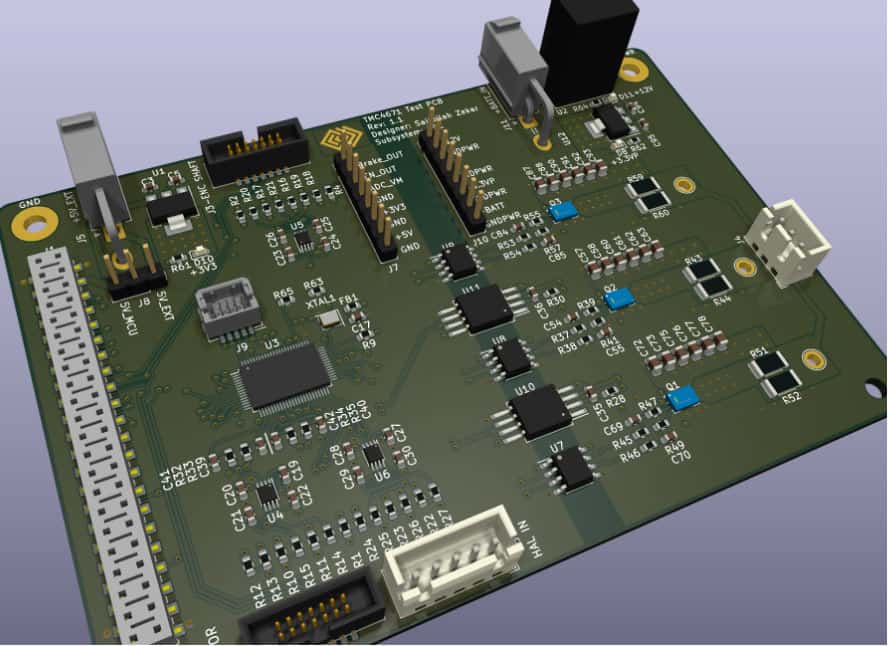
The next step is the integration of the mentioned blocks onto a single PCB. The design of this iteration is currently under review and scheduled for manufacturing soon. The 3D render of the design shown below provides sneak-peek. The subsequent Iteration will then attempt to improve space-usage on the PCB to achieve a compact form factor.
![]()
For more information please visit the WARR Space Robotics website.
Be the first to read all about our news and information. Follow us on




